 Deutsch
Deutsch English
English
Introducing the Python Example for CANgineBerry’s CANopen Manager Firmware
We are pleased to introduce the latest software update for the CANgineBerry, which now includes a Python example aimed at simplifying network management for developers working across Linux, Windows, and macOS. This new example uses the provided CANopen Manager firmware as an efficient way to visualize and manage devices on a CANopen network.
Unlike basic CAN interfaces (only passing through CAN frames), the CANgineBerry handles the entire CANopen Manager functionality. This allows the module to automatically scan the network, identify new devices, and configure the appropriate Process Data Objects (PDOs) without requiring manual intervention. Through this automated functionality, users can directly access the Object Dictionary entries for both the Manager and the connected devices, reducing the need for writing complex code.
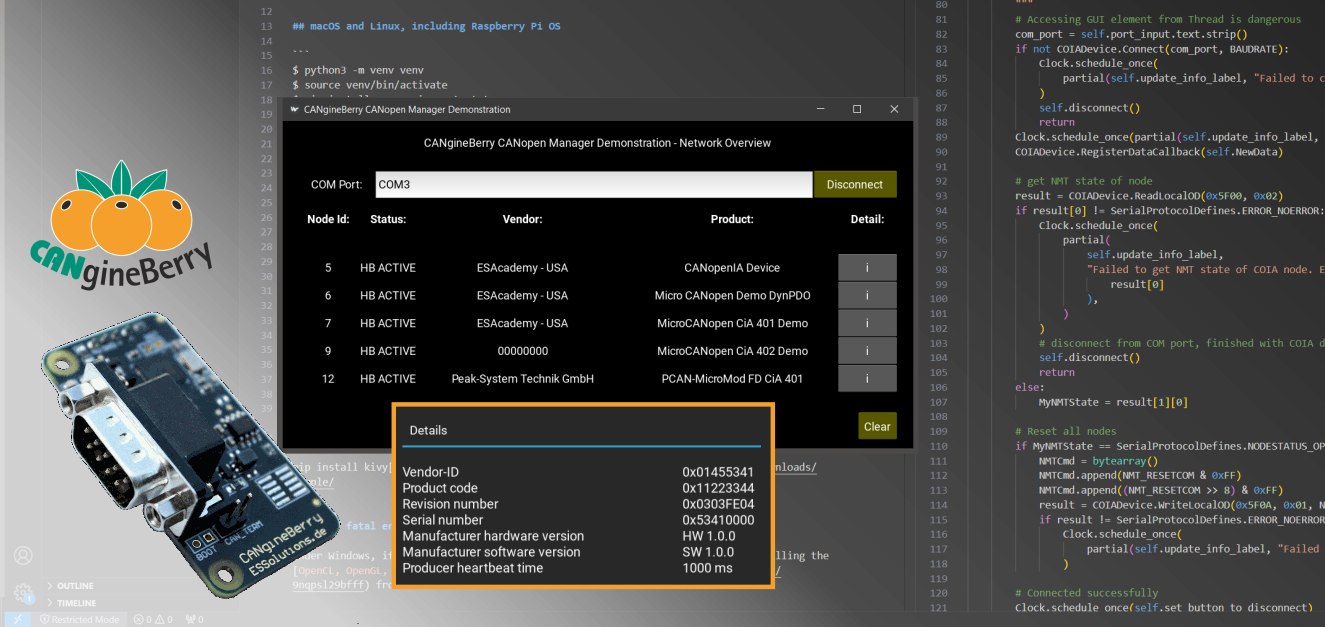
The Python example showcases these features through a lightweight graphical user interface (GUI). Once connected to a CANgineBerry, the script accesses detected devices, retrieves their details on demand, and presents them in an intuitive display. No matter the platform—Linux, macOS, or Windows—this tool provides rapid access to multiple devices on your CANopen network.
By delegating low-level CANopen management tasks to the CANgineBerry, developers are free to concentrate on higher-level application development. The Python-based GUI makes the configuration and monitoring of CANopen networks easy and gives you instant control over your devices.
This update further reinforces CANgineBerry’s position as more than a CAN bus interface. It remains a robust solution that simplifies CANopen network management, providing both flexibility and user-friendliness for embedded systems developers.
To download the example, go to: https://cangineberry.com/



 Embedded Networking with CAN and CANopen. Your technology guide for implementing CANopen devices.
Embedded Networking with CAN and CANopen. Your technology guide for implementing CANopen devices. Implementing scalable CAN security. Authentication and encryption for higher layer protocols, CAN and CAN-FD
Implementing scalable CAN security. Authentication and encryption for higher layer protocols, CAN and CAN-FD