 Deutsch
Deutsch English
English
CANgineBerry software and firmware updates
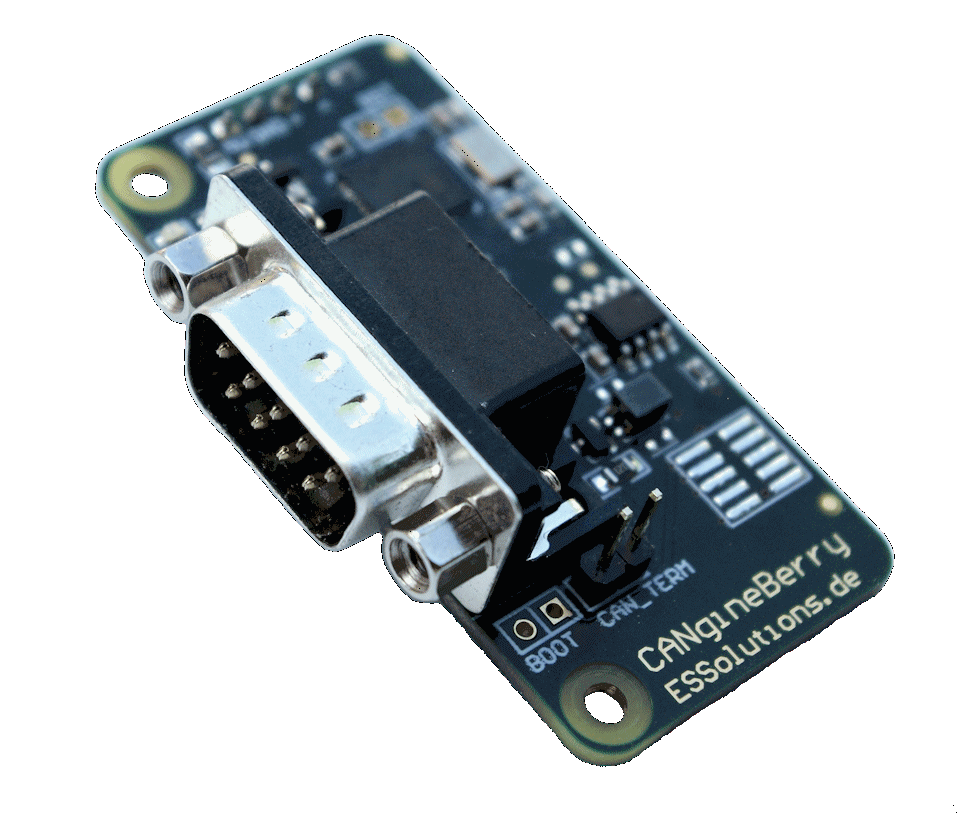
![]() The CANgineBerry (www.cangineberry.com) is a smart coprocessor module for the Raspberry Pi®, other popular embedded microprocessor systems or a PC. It allows offloading CANopen tasks from the main system while communicating with it though a regular serial port which greatly simplifies application development. Firmware for different purposes can be programmed through the same interface. New releases for the CANopen Device and Manager application firmware are now further enhancing the functionality of the CANgineBerry.
The CANgineBerry (www.cangineberry.com) is a smart coprocessor module for the Raspberry Pi®, other popular embedded microprocessor systems or a PC. It allows offloading CANopen tasks from the main system while communicating with it though a regular serial port which greatly simplifies application development. Firmware for different purposes can be programmed through the same interface. New releases for the CANopen Device and Manager application firmware are now further enhancing the functionality of the CANgineBerry.
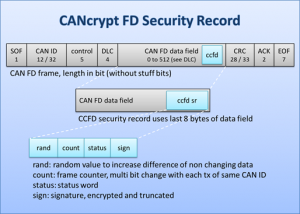
 The CANopenIA-BEDS (V1.5) firmware for CANopen devices now also supports the tunneling of plain-CAN messages for special cases where CANopen is not used or the network needs custom messages. It also adds CANcrypt to support secure and authenticated CANopen communication between up to 15 participants. Lastly, it now supports an advanced manual triggering for Transmit Process Data Objects (TPDOs) where the host application can decide when exactly to trigger the transmission of a TPDO in addition to the standard fully-automatic mode, .
The CANopenIA-BEDS (V1.5) firmware for CANopen devices now also supports the tunneling of plain-CAN messages for special cases where CANopen is not used or the network needs custom messages. It also adds CANcrypt to support secure and authenticated CANopen communication between up to 15 participants. Lastly, it now supports an advanced manual triggering for Transmit Process Data Objects (TPDOs) where the host application can decide when exactly to trigger the transmission of a TPDO in addition to the standard fully-automatic mode, .
The CANopenIA-MGR (V1.7) firmware implements a self-configuring CANopen controller/manager. It contiuously monitors the network for new CANopen nodes and scans their configuration in order to set up automatic PDO handling. Also here, the new version implements advanced manual triggering options for TPDOs. For example, when the application wants to write data to a remote CANopen node’s Object Dictionary (OD) entry, the default behavior is that the controller automatically decides which transport — PDO or Service Data Object (SDO) — to use, depending on whether that OD entry is part of a PDO or not. In some cases, more control is desirable, though, so now the application can disable the automatic handling and manually select SDO vs. PDO as well as manually trigger TPDO transmissions.
The latest CANgineBerry software and firmware is available here: [CANgineBerry.com]





 Embedded Networking with CAN and CANopen. Your technology guide for implementing CANopen devices.
Embedded Networking with CAN and CANopen. Your technology guide for implementing CANopen devices. Implementing scalable CAN security. Authentication and encryption for higher layer protocols, CAN and CAN-FD
Implementing scalable CAN security. Authentication and encryption for higher layer protocols, CAN and CAN-FD