 Deutsch
Deutsch English
English
Instant Access to CANopen with CANopen IA modules
Earlier this year, EmSA inherited the CANopen IA product line from ESSolutions. The product line goes back about 20 years and at the time the products were based on the Philip’s XA architecture. The current products are using the NXP LPC11Cxx microcontrollers (ARM Cortex M0). Right from the beginning, EmSA provided the firmware and support software for these products making EmSA a natural candidate to continue this product line after ESSolutions discontinued their operation.
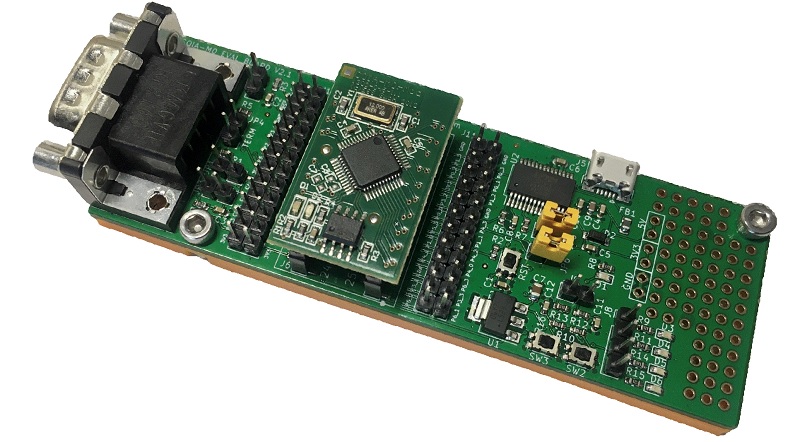
The base product is a small (31.5 x 20mm) 48pin module offering 7 configurable ports with 4 connectors each. Depending on the port number, a port can be configured to be:
- Digital input or output (4 signals)
- Remote access (serial UART, TTL)
- Internal analog input (4 times 8 or 10bit resolution)
- External analog input (4 times 12bit, I2C connected external)
- External analog output (4 times 12bit, I2C connected external)
At EmSA, we now continuously enhance the features of this product line. The latest firmware release V2.2 added remote access support to a host system via a serial TTL channel. This allows the module to be used as a CANopen communication processor in systems that can use a regular serial channel to communicate with the communication processor. A further enhancement added 8bit resolution access to the analog inputs (default use is 10bit resolution) now supporting a variety of CANopen joystick implementations.
An easy entry starter kit is now available, offering basic access to the functionality provided by the CANopen IA M0 module. All 48 pins of the module are made available on standard header rows, all marked with the matching pin names. For quick tests, switches and LEDs can be connected to any of those pins using jumper cables provided.
A CANopen FD version of the module is currently under development and scheduled for release early 2022.
For more information, see:
www.canopenia.com
www.canopenstore.eu




 Learn about our current product range for embedded systems
Learn about our current product range for embedded systems


 Embedded Networking with CAN and CANopen. Your technology guide for implementing CANopen devices.
Embedded Networking with CAN and CANopen. Your technology guide for implementing CANopen devices. Implementing scalable CAN security. Authentication and encryption for higher layer protocols, CAN and CAN-FD
Implementing scalable CAN security. Authentication and encryption for higher layer protocols, CAN and CAN-FD