 Deutsch
Deutsch English
English
Training and event paper presentation videos online
February 13th, 2020
Comments off
Over the last years we published more than 50 articles, papers, books, webinars and we also continuously updated our training materials. However, some of the training material and especially scientific papers only reach a small percentage of the embedded community. Therefore we decided to publish more free educational videos to reach more of you. As a start we created several playlists on our EmSA Youtube channel. These include:
- CANopen FD Intro
 :
:
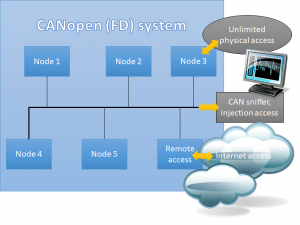
Introductory videos to CANopen FD, also covering some basics like an introduction to the CANopen Object Dictionary concept - CAN (FD) Security:
Video collection about CAN and CAN FD security challenges and solutions - MCUXpresso Middleware:
Video collection about NXP’s MCUXpresso and CANopen libraries included
We plan to publish more videos in the upcoming month, further focusing on CAN, CAN FD, CANopen, CANopen FD topics including introductory videos as well as in-depth technology classes.
Please subscribe to the channel to stay informed about new videos published.
Categories: ARM and ARM Cortex, CAN, CANopen, Development Tools, Microcontrollers, Security
CAN, CAN FD, CANopen, CANopen FD, Conference, Security, Training, Video, webinar





 Embedded Networking with CAN and CANopen. Your technology guide for implementing CANopen devices.
Embedded Networking with CAN and CANopen. Your technology guide for implementing CANopen devices. Implementing scalable CAN security. Authentication and encryption for higher layer protocols, CAN and CAN-FD
Implementing scalable CAN security. Authentication and encryption for higher layer protocols, CAN and CAN-FD